Autonomous freighters?
Automotive companies and research institutes are working under high pressure to develop autonomous and highly automated vehicles. However, the matter of “autonomous driving” is not only a current and relevant one in relation to roads and rails. Autonomous driving also holds great potential for (inland) shipping.
Inland waterway vessels are versatile, efficient, climate-friendly and safe — they are also essential for freight transport. A modern motorized freight vessel can replace between 90 and 150 trucks.
However, accordingly large inland vessels cannot navigate all waterways. They can also only call at destinations that offer appropriate loading facilities and container terminals. On the other hand, inland transport with smaller, more flexible ships is often simply not worthwhile — in part due to a lack of skilled personnel.
On the opportunities and obstacles of automation
Automation can counteract this shortage of skilled labor, make the industry overall more attractive and allow smaller ships to become more competitive. Improved sensor technology and smart choices regarding which routes to take at what speed can save energy and prevent accidents.
What, then, are the obstacles we face in regards to automation in inland waterway transportation? Well, whereas on the road the development of autonomous driving is carried along by vehicle manufacturers, the ship's engine and space have a comparatively long lifespan and thus a significantly longer development cycle. External impetus is needed here to drive innovation forward.
Due to the complex traffic situation of branched waterways, sluice gates, high traffic volume, etc. found in inland waterways compared to the high seas, such assistance systems as they are commonplace on seagoing vessels are hardly ever used on inland waterway vessels.
Autonomous vs. Automated
Although the two terms are often used synonymously, they do not mean the same thing:
Autonomous — Ideally, an "autonomously" operating inland waterway vessel would be able to make trips in a self-determined manner, or at the very least independently and without human intervention. It would be able to participate fully in ongoing traffic, i.e. follow traffic regulations, carry out overtaking maneuvers and sluice gate passages, adapt its route to dynamic conditions and adhere to a schedule.
Automatic/automated — Here, a distinction can be made between several levels of automation, but as a general rule, automated driving plainly refers to propulsion and maneuvering operations. Any interaction with other traffic participants is handled by humans, as is control of the vessel in the event of a failure or malfunction of the automatic control system.
Remotely controlled — A skipper can control the vessel from any location and has power over all operations necessary for control. This method requires a reliable data connection.
Clearly, „autonomous" or "automated" is not synonymous with "unmanned". On board a ship, there are more tasks than just steering the vessel. Additional tasks include inspection, maintenance and repairs. If a ship is unmanned, such tasks would have to be performed either by machines or, after docking, by shore personnel.
The current status of autonomous and automated shipping
The greatest challenge in autonomous and automated shipping is the interpretation of highly complex traffic scenarios and the resulting options for action. This is particularly true in inland waterway transport. Considerations and approaches to solutions for this challenge have been around for a few years. Initial projects are underway, including at the Entwicklungszentrum für Schiffstechnik und Transportsysteme e. V. (Development Center for Ship Technology and Transport Systems) in Duisburg, Germany, with whom we have had a working relationship for several years now. One of their focal points is the research of new developments for inland navigation.
The experimental vessels that have overwhelmingly been used for such projects up until now have always had their limitations regarding their suitability to generate data applicable to real-world environments. Research projects such as ELLA and Smart & Green are intended to change this.
The inland freighter of the future
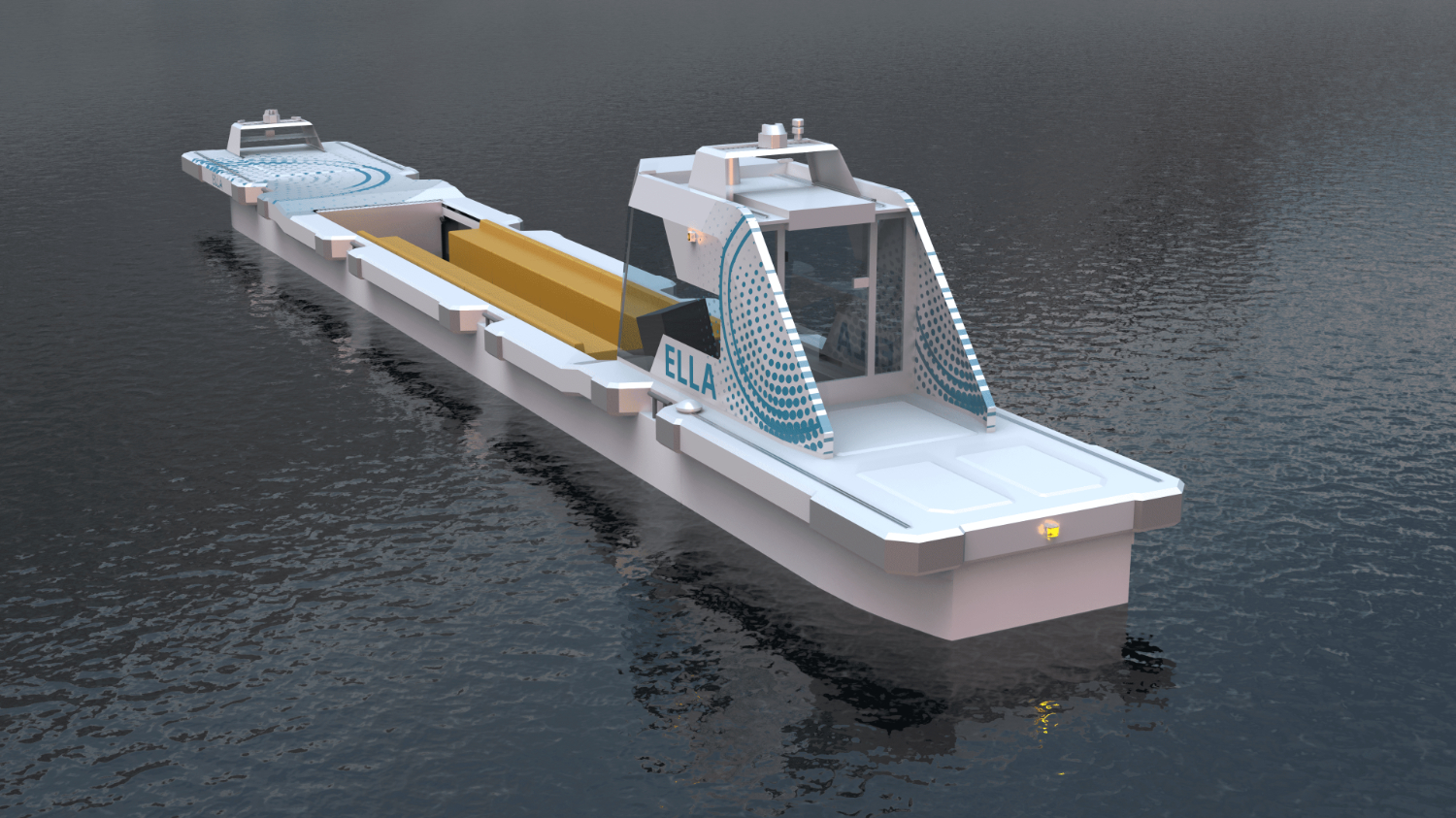
ELLA is "a model-scale development platform for maneuver automation" (DST). In other words, it is a battery-powered inland vessel model built to a scale of 1:6 and intended for research into highly automated driving on inland waterways. It is suitable for use on canals and lakes. Due to its driving characteristics and hull shape, it should allow the transfer of observations and research results to industrially used inland vessels on a wholly different level than it was possible up until now.
ELLA is meant to plan and execute docking and casting-off maneuvers, as well as sluice gate and bridge passages autonomously. This would make it the world's first inland waterway vessel model capable of fully autonomous operation. It would provide a unique opportunity to collect empirical data in terms of parameters such as environmental recognition, path planning and path tracking that can be transferred to "real" inland waterway vessels.
We are currently in the middle of the construction phase with the aim of delivering ELLA to its future location in the fall of this year and handing it over to the DST ready for operation. In order to enable further experimental setups, ELLA has a modular design and is equipped with all the control elements and operating controls required for inland vessels. These are being developed in parallel with the model’s construction at the University of Duisburg-Essen by the Mechatronics Department. The front and rear hulls of ELLA are each made of glass fiber reinforced plastic (GRP) and complement a steel midship. Individually removable ballast tanks adjust the weight carried.
ELLA's "home port" will probably be the Waltrop lock park, which with the old Henrichenburg ship lift — now the LWL Industrial Museum — will soon not only represent the history and the present of inland navigation, but will also build a bridge to the future with ELLA.
Autonomous driving is possible even under water
ELLA is not the first project of this kind for us, although it is the largest to date. Since 2009, in addition to our own developments, we have been working together with research institutions on innovative projects in connection with special water vehicles. As recently as March of this year, the autonomous water robot DeepLeng built by us for the Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) in Bremen was successfully tested in the Abisko National Park in Sweden. The long-term goal of the Eurex-Luna project is to explore Jupiter's moon Europa, where water is suspected to be hidden beneath a mile-thick layer of ice. Fascinated, we were able to watch via livestream how DeepLeng mastered its test run.
ELLA is a challenge in many ways. However: not only on the road, but also on the water, the future is electric, autonomous and modular.



